|
Консультант по электроснабжению
Не нашли нужный онлайн-расчет по электроэнергетике? Свяжитесь с нами!
ИИ-агент "Онлайн Электрик"
ИИ-агент "Онлайн Электрик" подскажет как найти нужный онлайн расчет или базу данных на сайте "Онлайн Электрик".
ИИ-агент присутствует в правом-нижнем углу каждой страницы .
Повышение точности автоматического контроля загрузки карьерных автосамосваловСеменов М.А., доцент кафедры электротехники, электроэнергетики и электромеханикиНациональный минерально-сырьевой университет «Горный»
Открытый способ добычи полезных ископаемых в настоящее время занимает ведущее место в горнодобывающей промышленности. На его долю приходится около 40% добываемого в России угля, 80% железной руды, порядка 75% цветных металлов и химического сырья и почти весь объем строительных горных пород. Для транспортирования полезных ископаемых на преобладающем большинстве карьеров используется автомобильный транспорт как наиболее мобильный, маневренный, легко приспосабливающийся к изменяющимся условиям горных работ. Чаще всего это большегрузные автосамосвалы производственного объединения БЕЛАЗ (Белорусский автозавод) грузоподъемностью от 30 до 220 т. Используются также автосамосвалы зарубежных фирм: Caterpillar (США); Komatsu (Япония); Liebherr (Германия); Terex (США); Euclid-Hitachi (Япония) и другие.
Все карьерные автосамосвалы являются мощными энергопотребляющими машинами, требующими значительных эксплуатационных расходов, постоянно растущих с увеличением глубины разработки карьеров. Затраты на транспортирование горной массы по различным карьерам и разрезам России составляет 50 – 70% от общих затрат на горные работы. Сокращение этих расходов состоит в эксплуатации автосамосвалов в оптимальных режимах, что является потенциальным резервом повышения эффективности работы любого карьера. Под оптимальными режимами понимаются: загрузка автосамосвалов в каждом рейсе в соответствии с их номинальной грузоподъемностью; оптимальный скоростной режим движения в груженом состоянии в соответствии с загрузкой и дорожными условиями; минимальный холостой пробег и минимальное время простоев. Обеспечить выполнение этих режимов невозможно без использования на автосамосвалах компьютеризированной аппаратуры автоматики. Загрузка автосамосвала в соответствии с номинальной грузоподъемностью означает полное использование его грузоподъемности без значительных недогрузов или перегрузов. Данные эксплуатации большегрузных автосамосвалов по многим карьерам России показывают, что 65-70% транспортных рейсов выполняются с недогрузом, а 10-15% - с перегрузом. Причем величина недогруза и перегруза составляет от 10 до 20% и более от номинальной грузоподъемности. В качестве примера можно привести данные по разрезу «Черниговский», на котором установлено следующее распределение выполненных рейсов автосамосвалом грузоподъемностью 120 т с различной загрузкой за месяц (см. таблицу).
Как видно из этого примера, на данном разрезе перегруз наблюдается в 2,1% рейсов, а недогруз в 83%. Среднее значение коэффициента использования грузоподъемности за месяц составляет 0,87, что, конечно, нельзя считать удовлетворительным, так как автосамосвал в целом недогружался на 15,5 т. [1]. Приведенные данные говорят о необходимости автоматического контроля загрузки автосамосвалов с целью ее нормализации в пределах номинальной грузоподъемности. Идея автоматического контроля загрузки появилась более 40 лет назад. Было предложено контролировать массу груза в кузове по величине давления газа в пневмогидравлических рессорах (цилиндрах) подвески автосамосвала, а информацию о загрузке передавать машинисту экскаватора световыми сигналами от специальных фонарей, установленных на кабине автосамосвала. Эта идея была реализована во многих экспериментальных образцах бортовых систем, изготовленных в Санкт-Петербургском горном университете. Образцы были опробованы и испытаны на различных автосамосвалах на многих карьерах и разрезах России, но до серийного изготовления, по разного рода причинам, не дошли. В настоящее время на отечественном рынке можно выделить практически одну систему, в которой реализован озвученный выше принцип контроля загрузки. Это – автоматизированная система диспетчеризации «Карьер», разработанная компанией ЗАО «Вист групп» (Москва)[2]. Система «Карьер» использует спутниковое глобальное позиционирование (GPS либо отечественную ГЛОНАСС), что позволяет точно определять координаты движущихся объектов (самосвалов), их скорости и маршруты. Одним из важнейших компонентов системы «Карьер» является система контроля загрузки и топлива СКЗ и Т, структурная схема которой приведена на рис.1. 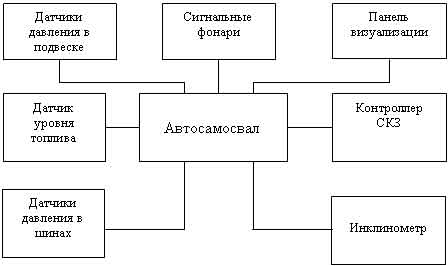 Рис.1. Структурная схема системы контроля загрузки и топлива СКЗ и Т Контроль загрузки автосамосвала обеспечивается датчиками давления, инклинометром, контроллером СКЗ и сигнальными фонарями шкалы загрузки. Датчики давления подсоединяются к полостям давления цилиндров подвески, инклинометр контролирует продольный крен автосамосвала на месте погрузки. Контроллер СКЗ обрабатывает сигналы от датчиков давления и инклинометра по заданной программе и вычисляет массу груза в кузове. Сигнальные фонари, установленные по боковым сторонам палубы автосамосвала, включаются контроллером при заполнении кузова на 80 и 100% и оповещают об этом машиниста экскаватора. Основной недостаток системы СКЗ и Т – низкая точность взвешивания загружаемой массы. Подвеска автосамосвала является нелинейной системой, включающей четыре пневмогидравлических цилиндра с сухим трением. Сухое трение в каждом цилиндре подвески является величиной случайной и может принимать в разные моменты времени значения в широком диапазоне от нуля до пяти и более тонн. При этом общая погрешность контроля загрузки может составлять 8-10% от массы груза в кузове. Указанная величина погрешности подтверждена результатами многочисленных исследовательских испытаний систем контроля загрузки, аналогичных СКЗ и Т, выполненных с участием автора на разных карьерах России [3, 4]. Известно, что правилами эксплуатации карьерного автотранспорта перегруз большегрузных автосамосвалов на 10% и более их паспортной грузоподъемности запрещен. Совершенно очевидно, что система СКЗ и Т при такой погрешности контроля загрузки не сможет обеспечить недопущение указанного перегруза. С другой стороны, как было указано выше, автосамосвалы в основном не догружаются. Объясняется это существующей технологией погрузки, когда груз из ковша не высыпается с определенной высоты, а ковш с грузом кладется в кузов, открывается днище и при его подъеме груз высыпаeтся. При этом на цилиндры подвески действует большая нагрузка, их штоки проседают на большую величину и после снятия нагрузки создавшееся давление не может вытолкнуть штоки до требуемого положения, так как их движение блокируется силами сухого трения. В результате СКЗ и Т фиксирует большую, чем на самом деле, массу груза и подает световые сигналы об окончании загрузки, хотя при этом самосвал оказывается недогруженным. Избежать указанных недостатков системы контроля загрузки автосамосвала можно только с повышением её точности [5, 6]. Известно, что вибрации является одним из способов борьбы с сухим трением. На автосамосвале вибрации присутствует. Они создаются вращающимися массами силового агрегата, и представляют собой гармоническое воздействие с частотой, определяемой числом оборотов холостого хода двигателя. Действие вибраций вызывает медленное изменение давления газа в цилиндрах подвески после разгрузки ковша экскаватора. Возникает скользящий процесс, или процесс вибрационного сглаживания, при этом показания массы груза в кузове на приборе СКЗ и Т тоже медленно изменяются. Эти изменения составляют от 0,5 до 6 т и более, а продолжительность скользящего процесса от 15 до 30 с. Важным в этом скользящем процессе является скорость изменения результата на приборе СКЗ и Т от действия вибраций. Если использовать скорость в качестве дополнительного параметра контроля загрузки и по её значению вводить в результат измерения коррекцию, то можно значительно улучшить точностные показатели контроля загрузки. Для подтверждения этого были проведены экспериментальные исследования на 110 и 120-тонных автосамосвалах БелАЗ по загрузке мерных грузов. Было установлено, что по окончании скользящего процесса, когда силы сухого трения блокируют цилиндры подвески и действие вибрации прекращается, показания бортовой системы и истинная масса груза в кузове различаются на 2-3 т. Это соответствует точности контроля загрузки автосамосвала в пределах 2,5-3 % от паспортной грузоподъемности. На рис. 2 представлены экспериментальные характеристики изменения показаний массы груза в кузове автосамосвала БелАЗ-75191 во времени от действия вибрации при загрузке мерного груза массой 10,64 т. Загрузка выполнялась четыре раза - от очень плавной установки груза до жесткой. Общая масса мерных грузов в кузове после загрузки составила 100,2 т. Скользящий процесс начинался с четырех разных точек от 103,4 т до 107,7 т и продолжался от 14 с до 27 с (кривые 1-4 на рис. 2). Из рис. 2 видно, что в каждом из четырех случаев скорость протекания скользящего процесса V разная, особенно в самом его начале. 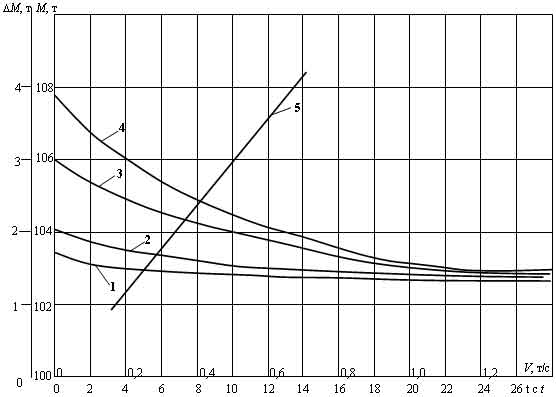 Рис. 2. Экспериментальные характеристики зависимости показаний массы груза M в кузове автосамосвала БелАЗ-75191 от времени при загрузке мерного груза массой 10,64 т (кривые 1-4) и величины коррекции ΔМ= f(V) (кривая 5). На рис. 2 представлена также зависимость изменения величины коррекции ΔМ от скорости процесса вибрационного сглаживания V (кривая 5), построенная по усредненным экспериментальным данным. Фактически это линейная зависимость. На основе анализа результатов проведенных экспериментальных исследований предложен новый способ контроля загрузки. Масса груза при загрузке определяется по давлению газа в цилиндрах подвески в момент окончания всех колебаний и начале процесса вибрационного сглаживания. Затем в первые две секунды определяется скорость протекания этого процесса и ее знак. В результат измерения вводится коррекция ΔМ= f(V) таким образом, чтобы погрешность измерения с высокой степенью вероятности составила 2,5-3 %. Техническая реализация предложенного способа контроля загрузки в системе СКЗ и Т не требует никакого дополнительного оборудования. Необходимо только расширение функциональных возможностей программного обеспечения и введения его в контроллер СКЗ бортового оборудования. Наличие в системе СКЗ и Т сигнальных фонарей обеспечивает информационную связь между автосамосвалом и экскаватором. Включение фонарей информирует машиниста экскаватора о достижении оптимальной загрузки и он подает сигнал о начале движения груженого автосамосвала к месту разгрузки. По отзывам машинистов экскаваторов сигнальные фонари не всегда хорошо видны по разного рода причинам, например в хорошую солнечную погоду, что создает определенные неудобства. В связи с этим высказывались предложения о необходимости передачи информации о загружаемой массе груза на табло машиниста экскаватора. С учетом развития современных средств передачи данных и информационных технологий это предложение заслуживает внимания и может быть реализовано в качестве дополнительной и очень важной функции системы СКЗ и Т. Представленные предложения по повышению точности контроля загрузки карьерных автосамосвалов и передаче информации о загрузке машинисту экскаватора значительно повысят достоинства системы контроля загрузки как важного звена мониторинга карьерного транспорта и увеличат её востребованность не только на отечественном рынке. Список использованных источников 1. Владимиров Д.Я. Система управления горнотранспортным комплексом «Карьер»: основные направления, модернизация и развитие/ Д.Я.Владимиров, А.Ф.Клебанов // Горное оборудование и электромеханика, 2006, №8. 2. Клебанов А.Ф. Система диспетчеризации большегрузных автосамосвалов «КАРЬЕР» на разрезе «Черниговский»: структура, функциональность, экономическая эффективность / А.Ф. Клебанов, Д.Я. Владимиров, Л.В. Рыбак // Горная промышленность. 2003. № 1. С. 52-56. 3. Семенов М.А. Автоматический контроль загрузки карьерных автосамосвалов / М.А. Семенов, О.М. Большунова, Ю.А. Гаврилов // Записки Горного института. 2004. Т.157. С. 131-133. 4. Кулешов А.А. Эффективность и перспективы применения бортовых систем контроля загрузки и учета работы карьерных автосамосвалов / А.А. Кулешов, М.А. Семенов // Горные машины и автоматика. 2000. № 3. С. 35-38. 5. Семенов М.А. Повышение точности взвешивания массы груза в кузове карьерного автосамосвала / М.А.Семенов, О.М.Большунова // Горное оборудование и электромеханика. 2009, №9. С. 39-41. 6. Семенов М.А. Контроль загрузки карьерных автосамосвалов /М.А.Семенов, О.М.Большунова // Записки Горного института. СПб, 2008. Т.178. С. 143-145. Библиографическая ссылка на статью: Семенов М.А. Повышение точности автоматического контроля загрузки карьерных автосамосвалов // Онлайн Электрик: Электроэнергетика. Новые технологии, 2012.–URL: /articles.php?id=22 (Дата обращения: 03.08.2026)
|
| Вход в систему |
| Восстановление пароля |
| Смените пароль |
| Регистрация нового пользователя |