|
Консультант по электроснабжению
Не нашли нужный онлайн-расчет по электроэнергетике? Свяжитесь с нами!
ИИ-агент "Онлайн Электрик"
ИИ-агент "Онлайн Электрик" подскажет как найти нужный онлайн расчет или базу данных на сайте "Онлайн Электрик".
ИИ-агент присутствует в правом-нижнем углу каждой страницы .
Функциональная схема автоматической системы исключения столкновений рудничных поездовКордаков В.Н., профессор кафедры автоматизации технологических процессов и производств,Лакота О.Б., доцент кафедры электротехники и электромеханики Санкт – Петербургский государственный горный университет
Рудничный электровозный транспорт является одним из звеньев технологического процесса по добыче горной массы. Его ритмичность работы, технико-экономические показатели и безопасность движения поездов во многом определяются состоянием, бдительностью машиниста электровоза и его реакцией на сигналы двухзначной светофорной сигнализации.
По данным института безопасности в горной промышленности порядка 30-40% случаев аварий от общего количества на горном предприятии приходится на рудничный электровозный транспорт. Основной причиной является столкновение рудничных поездов, находящихся на откаточном горизонте. Поэтому создание автоматической системы исключения столкновения поездов, работающей независимо от состояния и наличия машинистов на электровозах, является актуальной задачей. Функциональная схема автоматической системы исключения столкновений рудничных поездов представлена на рис.1. 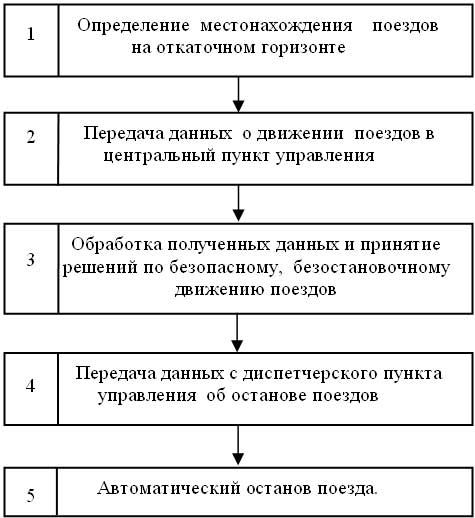 Рис.1.Функциональная схема автоматической системы исключения столкновений рудничных поездов Учитывая особенности состояния откаточных путей (обводненность, эпизодическая засыпка рельс токопроводящей горной массой и др.) на подземных горных предприятиях применяется точечный метод местонахождения поездов. Используются контактные, электромагнитные, инфракрасные, ультразвуковые и другие типы датчиков. Информация о местонахождении поездов на откаточном горизонте передается в центральный пункт управления горного предприятия (блок 2, рис.1). Это позволяет организовать безостановочное, безопасное движение грузовых, порожних, специальных, людских и других типов поездов. Для передачи информации об оперативном расположении поездов на откаточном горизонте используются проводные (многожильные, двухжильные), беспроводные, комбинированные и другие системы связи. Повышение показателей надежности, совершенствование структуры их системы связи, изменение топологии транспортной сети обусловливают целесообразность использования в качестве промежуточных узлов связи тяговые, зарядные подстанции, вспомогательные выработки, находящиеся на откаточном горизонте. С целью обеспечения безопасного контролируемого движения поездов транспортная сеть откаточного горизонта разбивается на управляемые блок-участки. На каждом блок-участке располагаются датчики контроля местонахождения поездов и устройства передачи информации о дальнейшем следовании по маршруту или останове поезда. Тяговая сеть рудничного контактного электровозного транспорта разбивается на управляемые блок-участки, питаемые от управляемых выключателей. В случае применения аккумуляторных электровозов, дизелевозов, гировозов на транспортной сети устанавливаются управляемые шлейфы. Протяженности однотипных блок-участков контактной сети или шлейфов транспортных веток, по которым следуют поезда, являются равными. Наличие напряжения в секциях контактной сети или шлейфах является необходимым условием продолжения движения по маршрутам, а его отсутствие – останова поездов. Обработка данных о расположении поездов на секционированной транспортной сети откаточного горизонта и принятие решения по дальнейшему их следованию осуществляется подсистемой блокировки блок-участков (блок 3, рис.1).Она функционирует по заданному алгоритму, учитывающему расположение поездов и тип устройства блокировки блок-участков. Существует несколько типов устройств блокировки блок-участков. Для заданных параметров движения поездов на откаточном горизонте выбор типа устройства блокировки блок-участков осуществляется по критерию минимизации приведенных затрат. При этом учитываются расходы на создание и эксплуатацию секционированной транспортной сети для заданного типа подвижного состава, его параметров движения и величины грузопотока на главных и вспомогательных ветках откаточного горизонта. Выбор оптимального типа устройства блокировки блок-участков осуществляется в блоке 3 (рис.1). На рис.2 представлена структурная схема подсистемы блокировки блок-участков, обеспечивающая безопасность движения поездов и максимальную пропускную способность транспортной ветки. Схем содержит: 1,2,3 – блок-участки контактной сети, изолированные между собой и подключенные к сети электроснабжения 7 через управляемые выключатели 4,5,6; 8,9,10 – блоки аппаратуры разделки маршрутов (основаны на реализации логической функции «И»); 11,12,13 – путевые датчики, предназначенные для фиксации нахождения поездов на блок-участках 1,2,3 и устанавливаемые на длину поезда от начала изолированной секции блок-участков (основаны на реализации логических элементов «память»); 14,15,16 – блоки занятости блок-участков; 17,18,19 –путевые датчики, устанавливаемые от конца блок-участка 1,2,3 на длину тормозного пути. 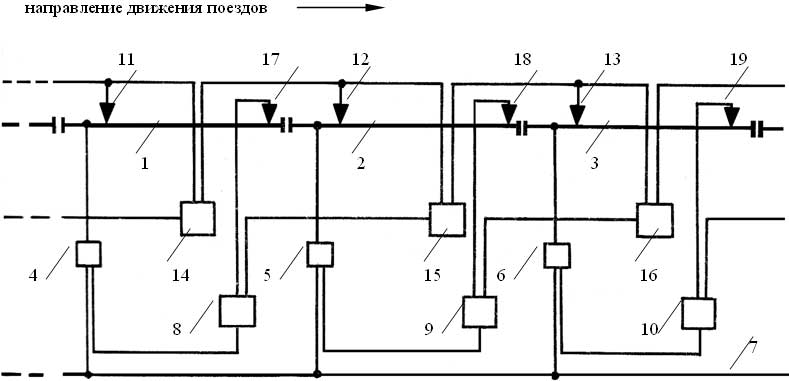 Рис.2. Структурная схема подсистемы блокировки блок-участков секционированной транспортной сети откаточного горизонта Путевые датчики 11,12,13 контролируют занятость рассматриваемых блок-участков; датчики 17,18,19 служат для подачи сигнала об останове поезда, находящегося на смежном на блок-участке. При нахождении первого поезда (на рис.2 - слева направо) в зоне действия датчика 12, принадлежащего блок-участку 2, поступает сигнал на входы блоков занятости 15 и 14. С выхода блока занятости 15 поступает информация на первый вход блока 8 разделки маршрута о занятости блок-участка 2. При нахождении следующего (второго) поезда в зоне действия датчика 17 поступает сигнал на второй вход блока 8 аппаратуры разделки маршрута. Наличие двух сигналов на входах блока 8 приводит к возникновению выходного сигнала с этого блока, что обусловливает отключение выключателя 4 от общей сети электроснабжения 7. В соответствии с блоком 5 функциональной схемы это приводит к автоматическому останову второго поезда на блок-участке 1. Дальнейшее движение первого поезда с блок-участка 2 на блок-участок 3, и прохождение его в зоне действия путевого датчика 13 приводит к срабатыванию блока 16 занятости блок-участка 3. При этом исчезает сигнал с выхода блока 15. На вход блока 8 разделки маршрута поступает информация об освобождении поездом блок-участка 2. С выхода блока 8 поступает сигнал на второй вход управляемого выключателя 4 о подключении контактной сети блок-участка 1 к общей сети электроснабжения 7. Ранее остановленный второй поезд на этом блок-участке продолжает движение. Методика определения параметров блок-участков секционированной транспортной сети основана на анализе движения следующих друг за другом поездов по главным и вспомогательным веткам транспортной сети откаточного горизонта. На рис. 3 представлена схема расположения поездов П1 и П2, соответствующая схеме на рис.2. Она содержит путевые датчики (Д1, Д3, Д5) контроля занятости блок-участков и датчики торможения (Д2, Д4, Д6).  Рис.3. Расчетная схема блок-участка секционированной транспортной сети откаточного горизонта Для обеспечения безостановочного, безопасного движения поездов на участке секционированной транспортной сети необходимо выполнение условия где Δlmin - минимальное безопасное расстояние между поездами П1 и П2, движущимся по смежным блок-участкам, м; lП - длина поезда, м ; lГ – гарантированное расстояние блок-участка, обеспечивающее безостановочное движение поездов, м; lТ - расстояние тормозного пути поезда, равное kЗ - коэффициент запаса, учитывающий время срабатывания коммутационной аппаратуры (kЗ =1,2); lТ0 =40 м – минимальное расстояние тормозного пути поезда. Технологическое расстояние Δ lТ0 между поездами определяется из условия: ΔV – рассогласование скоростей движения поездов, обусловленное жесткостью скоростной характеристики автоматизированного привода электровоза и системой стабилизации скорости поездов, м·с-1; Δt - интервал времени между поездами, с:
qc – вместимость вагонеток поезда, т; kн - коэффициент неравномерности работы электровозного транспорта; Qч – часовой грузопоток по рассматриваемой ветке откаточного горизонта, т·ч-1. В соответствии с выражениями (1)÷(4) определяются гарантированные расстояния блок-участков транспортного горизонта и при необходимости – параметры автоматической системы стабилизации скорости поездов. При несоблюдении условия (1) с центрального пункта (блок 4, рис.1) управления поступает сигнал на отключение управляемых выключателей, что приводит к автоматическому срабатыванию тормозной системы электровоза и останову поездов (блок 5, рис.1). Разработаны автоматические системы торможения электровоза. Технические решения по реализации подсистем функциональной схемы являются новыми [1]-[4]. Методика расчета параметров автоматической системы исключения столкновения поездов рудничного электровозного транспорта и технические решения по реализации подсистем использованы в проектной документации ОАО ин-т «Гипроникель» (для рудника Молибден ТГМК) , ин-т Средазнипроцветмет (для рудника «Алтын-Топкан Алмалыкского ГМК). 1. Анискин Б.Г., Кордаков В.Н. , Лакота О.Б. Электровозный транспорт на горных предприятиях, проблемы и решения // Горные машины и автоматика. – М.2003. - №15.- С.13. 2. Кордаков В.Н., Лакота О.Б. Принципы построения автоматической системы исключения столкновения поездов рудничного электровозного транспорта // Горные машины и электромеханика.- М. 2000 . - №2. - С.20. 3. Кордаков В.Н. , Лакота О.Б. Устройство для торможения электровоза // А.с. № 935330. 1982. Бюл. № 22. 4. Кордаков В.Н. , Лакота О.Б.. Устройство блокировки занятости блок-участков контактной сети / А.с. №1172803. 1986. Бюл. №30. Библиографическая ссылка на статью: Кордаков В.Н., Лакота О.Б. Функциональная схема автоматической системы исключения столкновений рудничных поездов // Онлайн Электрик: Электроэнергетика. Новые технологии, 2012.–URL: /articles.php?id=10 (Дата обращения: 12.07.2026)
|
| Вход в систему |
| Восстановление пароля |
| Смените пароль |
| Регистрация нового пользователя |
 ,
,