|
Консультант по электроснабжению
Не нашли нужный онлайн-расчет по электроэнергетике? Свяжитесь с нами!
Бот Яша
Бот Яша подскажет как найти нужный онлайн расчет или базу данных на сайте "Онлайн Электрик".
Написать боту.
Исследование электромеханической системы «источник соизмеримой мощности – тиристорный электропривод постоянного тока»Спирин Б.А., Макаренко Н.В.Карагандинский государственный технический университет
Опыт эксплуатации тиристорного электропривода постоянного тока (ТЭП ПТ) на буровых установках, экскаваторах и другой горнодобывающей технике показал, что на его динамические и статические характеристики существенное влияние оказывают внутренние параметры источника электроснабжения, линии электропередач и нелинейные характеристики управляемого выпрямителя. Однако в существующих разработках в достаточной степени не рассмотрены динамические свойства и особенности работы ТЭП ПТ горных машин и механизмов при электроснабжении от источника соизмеримой мощности (ИСМ) [1, 2].
Так, в режимах пуска электропривода и при значительном изменении его нагрузки наблюдается несанкционированное закрытие тиристоров из-за превышения значения электродвижущей силы (ЭДС) якоря двигателя над амплитудным напряжением сети, обусловленное падением напряжения в ней. При этом тиристоры закрываются, a сигнал датчика тока, поступающий в систему регулирования, близок к нулю, что приводит к резкому увеличению выходного сигнала регулятора скорости. С исчезновением тока в цепи якоря напряжение сети начинает превышать значение ЭДС якоря двигателя и тиристоры, при наличии управляющего воздействия, открываются. Поскольку выходное напряжение регулятора тока очень велико, это, в свою очередь, вызывает возрастание ЭДС якоря и превышение его значения над выпрямленным значением напряжения сети. Последнее вновь приводит к несанкционированному закрытию тиристоров. В результате система входит в автоколебательный режим. Для исследования динамических свойств ТЭП ПТ при электроснабжении от ИСМ в программной среде MatLab была использована имитационная модель электромеханической системы ИСМ - ТЭП ПТ [3]. Указанная модель, представленная на рисунке 1, была оптимизирована автором работы. 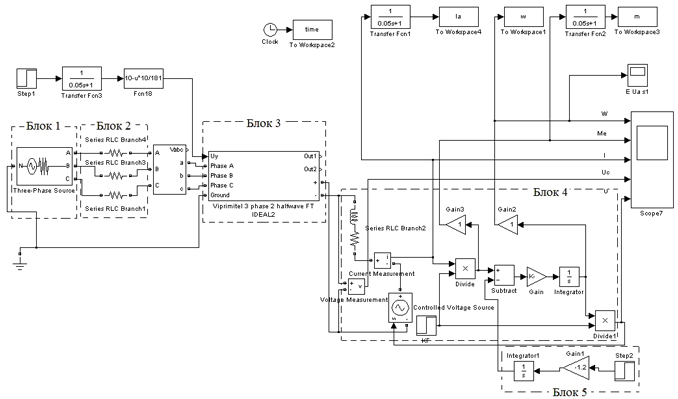
Рисунок 1 – Имитационная модель электромехaнической системы ИСМ-ТЭП ПТ в прогрaммной среде MatLab Здесь блок 1 выполняет функцию трехфазного источника питания. Блоком 2 задается значение сопротивления RL на выходе источника питания. Блок 3 это трехфазный тиристорный выпрямитель. Блоком 4 моделируется двигaтель постоянного токa незaвисимого возбуждения. Блоком 5 задается значение нагрузочного момента на двигатель. В ходе эксперимента в среде MatLab с использованием описанной модели изменялось значение сопротивления RL на выходе источника питания. Для каждого из значений сопротивления RL изменялось значение нагрузочного момента на двигатель в интервале от 1 до 5 номинальных моментов двигателя МН. Под параметром RL следует подразумевать сопротивление силовой линии электроснабжения удаленного потребителя либо выходное сопротивление автономного источника питания. В ходе моделирования было проведено 90 опытов с тремя типами двигателей разной мощности. Для проведения экспериментов были выбраны двигатели постоянного токa с незaвисимым возбуждением получивших рaспрострaнение в промышленности, 4ПФ132L мощностью 22 кВт, 4ПФ160L мощностью 45 кВт и 4ПФ180L мощностью 68 кВт, хaрaктеристики которых приведены в тaблице 1.
В ходе каждого опыта снимались осциллограммы, характеризующие динамические процессы, протекающие в электроприводе при изменении сопротивления RL и нагрузочного момента. Эксперименты показали, что при моделировании с двигателем 4ПФ180L и сопротивлением RL в 0,1 Ом переход из двигательного режима в режим автоколебаний происходит только при значительных нагрузочных моментах, равных четырем номинальным и выше. Аналогично при сопротивлении RL, равным 1 Ом, 5 Ом и 10 Ом была проведена серия опытов для двигателей 4ПФ160L и 4ПФ132L при изменении нагрузочного момента от 1-го до 5-ти номинальных. Полученные осциллограммы показали, что двигатели меньшей мощности являются менее устойчивыми с точки зрения возникновения явления автогенерации, происходящего в связи с недостаточной амплитудой питания. По результатам проведенных экспериментов с помощью имитационной модели, была получена зависимость изменения времени перехода тиристорного электропривода в автоколебательный режим от сопротивления RL при различном моменте сопротивления. На рисунке 2 представлена динамика изменения для двигателя 4ПФ180L времени перехода тиристорного электропривода в автоколебательный режим от сопротивления силовой линии RL для различных значений нагрузки МС. 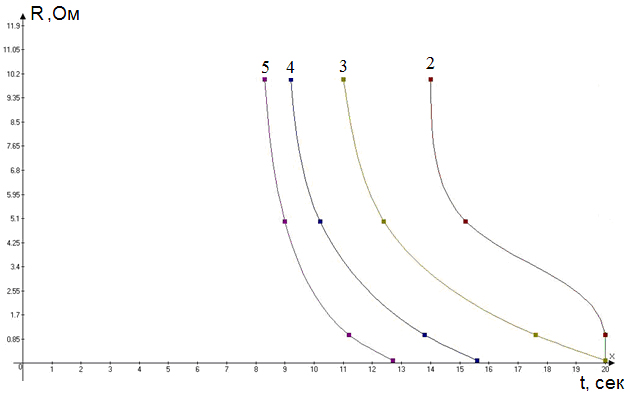
Рисунок 2 - Зависимость изменения времени перехода тиристорного электропривода в автоколебательный режим от сопротивления RL, где 1, 2, 3, 4 и 5 – значения нагрузочного момента Из полученной зависимости видно, что при номинальном моменте сопротивления двигатель 4ПФ180L не переходит в автоколебательный режим. Электропривод продолжает работать в нормальном двигательном режиме независимо от сопротивления RL. Аналогично были получены зависимости для двигателей 4ПФ160L (рисунок 3) и 4ПФ132L (рисунок 4) 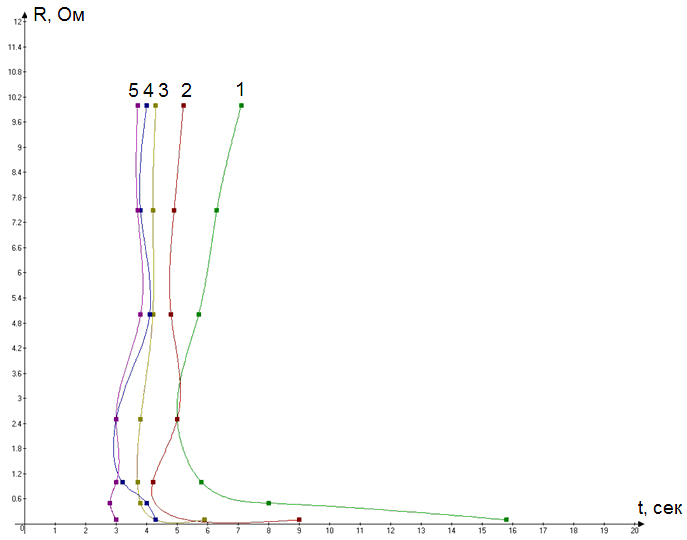
Рисунок 3- Зависимость изменения времени перехода тиристорного электропривода в автоколебательный режим от сопротивления RL для двигателя 4ПФ160L, где 1, 2, 3, 4 и 5 – значения нагрузочного момента 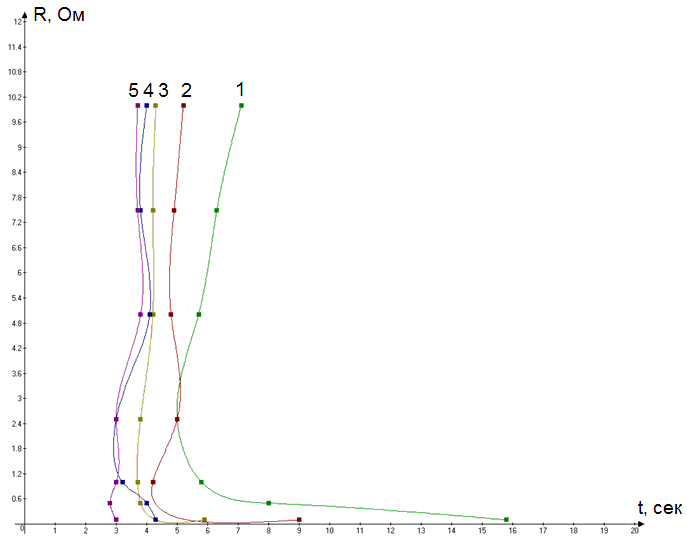
Рисунок 4 - Зависимость изменения времени перехода тиристорного электропривода в автоколебательный режим от сопротивления RL для двигателя 4ПФ132L, где 1, 2, 3, 4 и 5 – значения нагрузочного момента Представленные на рисунках 6 – 8 характеристики показали нелинейный характер изменения устойчивости тиристорного электропривода при электроснабжении от источника соизмеримой мощности с изменением сопротивления RL. С уменьшением мощности двигателя отмечено явление, которое характеризуется уменьшением времени перехода из двигательного режима в автоколебательный при малых сопротивлениях RL. Для двигателей же средней мощности 4ПФ180L характерно наличие степенной формы графиков (y = xp, где р<0). 1. Булатов А.И., Проселков Ю.М., Шаманов С.А. Техника и технология бурения нефтяных и газовых скважин: Учеб. для вузов. – М.: Недра-Бизнесцентр, 2003. – 1007 с. 2. Парфенов Б.М., Кожаков О.И., Шиленков В.А. Электропривод буровых установок // Привод и управление. – 2001. - № 5. – С. 8-15. 3. Эм Г.А., Брейдо И.В.Тиристорный электропривод постоянного тока горных машин: Влияние импульсного характера работы силового преобразователя на свойства тиристорного электропривода постоянного тока: Монография / LAPLAMBERT Academic Publishing GmbH&Co. KG Heinrich-Böcking-Str. 6-8, 66121 Saarbrücken, Germany, 2012. – 83 с. Библиографическая ссылка на статью: Спирин Б.А., Макаренко Н.В. Исследование электромеханической системы «источник соизмеримой мощности – тиристорный электропривод постоянного тока» // Онлайн Электрик: Электроэнергетика. Новые технологии, 2012.–URL: /articles.php?id=58 (Дата обращения: 19.04.2024)
|
| Вход в систему |
| Восстановление пароля |
| Смените пароль |
| Регистрация нового пользователя |